
Kaz Gunning
Co-Founder & VP of Navigation

The Precision Illusion
Centimeter-level positioning matters because a lot of the systems now moving into the real world – from drones and delivery robots to autonomous vehicles, precision agriculture, and infrastructure monitoring – depend on knowing exactly where they are, continuously and reliably. Existing GNSS signals can support that level of accuracy today, but getting there usually means adding a lot of support around the signal. A receiver needs precise satellite orbit and clock information, along with a way to account for atmospheric delays and other effects that distort the signal on its way to Earth. The satellites may be overhead, but that alone does not produce a centimeter-level solution.
That is why high-precision methods such as PPP and RTK exist. They improve the final position by reducing error in the measurements and by bringing in correction products from base stations, monitoring networks, or external data services. Those additions can be very effective, but they also make precision dependent on convergence time, data delivery, and supporting infrastructure. In practice, that means users may spend time waiting for accuracy before work can begin, checking whether correction streams are available, or troubleshooting equipment and connectivity when performance drops. For a farmer, that can mean delays in the field and more time managing the positioning system instead of the work. For other users, it can mean added setup complexity and less confidence that precision will be there when conditions become less than ideal. A receiver is often working through layers of error before the solution settles into something users can actually work with.
The GNSS industry has pushed this model remarkably far. Over the years, engineers have extracted more value from the same broadcast signals through better estimation methods, more detailed correction models, and stronger processing on the receiver side. Even so, the underlying measurements still come from signals that arrive weak at the user and remain vulnerable to blockage, deflection, and environmental variability.
That is where the gap begins to show. Precision today is achievable, but not equally available everywhere and not equally reliable in all conditions. Performance can depend on whether the receiver can maintain access to corrections, whether the surrounding environment is cooperative, and whether the supporting infrastructure is sufficient to sustain the solution. The centimeter-level result is real and attainable, but in practice it is often reserved for users who can afford the equipment, maintain the setup, and keep the correction pipeline running.
A System Built for a Different Era
GPS was designed in an era when onboard compute, communication links, and satellite autonomy were far more limited than they are today. Today, GPS reflects those constraints, with influence from military requirements driving an architecture where orbit and clock solutions estimated on the ground and uploaded to the satellites roughly once per day. In medium Earth orbit, the system depends on the predictability of satellite motion and the stability of high-end atomic clocks. A global network of monitoring stations receives the signals, sends those measurements to a centralized control segment, and that control segment estimates the satellites’ positions, velocities, and clock states for the next 24 hours or more before uploading that information back to the satellites. Users then receive those broadcast predictions, even as their quality gradually degrades between uploads. The satellites themselves are not expected to continuously solve for their own state in real time, and they do not operate as a networked system that shares information internally. That design made sense for the goals of the time, but it also shaped how precision GNSS had to develop afterward.
To push this architecture to centimeter-level performance, the industry built layers around it. Corrections are used to improve the broadcast information and to account for delays introduced as signals pass through the ionosphere and troposphere. These corrections can make a major difference, especially by reducing convergence time, but they require a great deal of supporting infrastructure. Atmospheric behavior changes across space and time, sometimes over surprisingly short distances. In the San Francisco Bay Area, cold, foggy Pacifica sits only a few miles from warm, sunny Burlingame, and those local weather differences, together with changes higher up in the ionosphere, still contribute to GNSS error. Capturing that variation requires monitoring networks that are both wide and dense, along with large data streams to deliver those corrections to receivers. The correction products themselves also have to be processed, distributed, and delivered through external data streams. Precision is achievable in this model, but it depends on a longer chain of supporting systems: monitoring networks, processing pipelines, and reliable data delivery all become part of the positioning solution.
The result is that precision sits on top of GNSS instead of emerging directly from it. If a user has a strong enough signal, access to the right correction service, and a reliable path to receive that data, then centimeter-level positioning becomes possible. But if any one of those pieces drops out, performance can degrade quickly. In practice, this makes precision conditional. It depends not only on satellites being overhead, but on whether the surrounding correction infrastructure is available, dense enough, and stable enough to support the solution.
This is the limitation of the current model: it can produce precision, but it does so through layers added onto a system that was not originally built to provide it natively.
Changing the Architecture, Not Adding Another Layer
Pulsar takes a different approach by starting with the signal and the orbit it operates in, instead of building another correction layer on top of legacy GNSS. Its signals are transmitted with higher power and wider bandwidth, which improves the quality of the measurements a receiver can make from the start. In open sky, that means lower-noise pseudorange measurements and more stable carrier phase tracking. In more difficult conditions, the same signal strength helps receivers maintain lock more consistently, even when signals are weakened by obstruction or degraded by multipath effects. The gain is not only in signal strength. The measurements are cleaner too and easier for the receiver to work with.
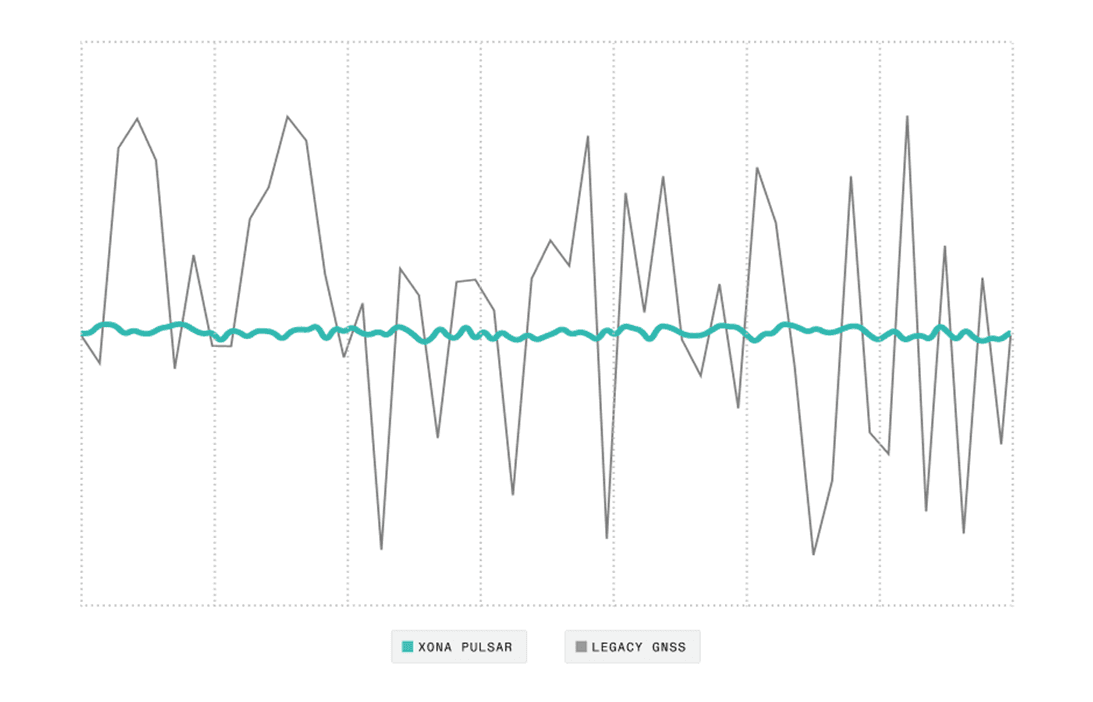
Pulsar broadcasts a higher bandwidth signal, unlocking lower-noise positioning measurements without additional hardware.
Operating in Low Earth Orbit changes the geometry of positioning as well. GPS satellites in medium Earth orbit move slowly across the sky, so the geometry of the solution changes gradually over time. Pulsar satellites move much faster, crossing a user’s field of view in ten minutes, whereas GPS satellites in medium Earth orbit move much more slowly over the same period, taking hours to traverse the sky. That faster motion improves geometric diversity over short time windows, which gives the receiver a better spread of measurements to work with. Over several minutes, that changing geometry improves observability and supports a more stable position solution. It also helps with one of the long-standing challenges in GNSS: separating the true signal from reflected ones. Because multipath changes more quickly with fast-moving LEO satellites, it becomes easier to identify and reject those reflected paths.
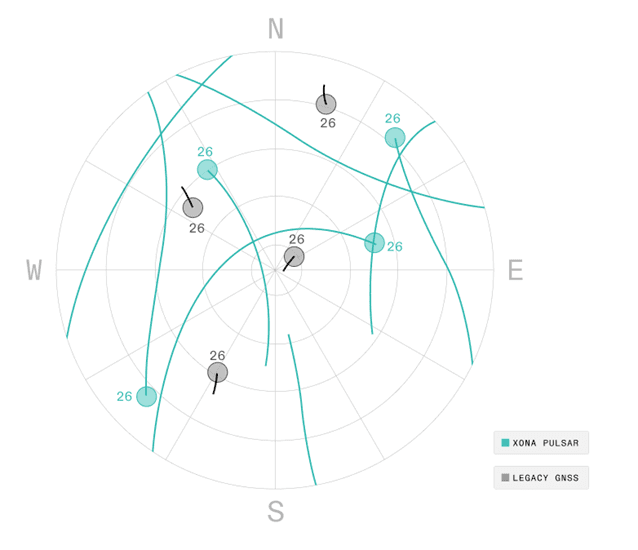
Operating 20x closer to Earth, Pulsar satellites traverse across the sky far more rapidly in the same time period, resulting in additional measurements that help differentiate between real signals and reflected signals
These improvements are not only about user-side signal tracking. They also change where precision is generated in the system. In conventional GNSS workflows, orbit and clock errors are handled downstream through correction services and estimation layers added on top of the broadcast signal. Pulsar pushes that precision upstream. Since error in satellite position and clock state feeds directly into user position error, improving those estimates at the spacecraft level reduces how much has to be corrected later. That shift means precision is no longer treated as something recovered after the fact, but as something the system is designed to support from the beginning.
Moving Precision Into Orbit
Providing native centimeter-level accuracy in real time requires more than a stronger signal and faster geometry. It also requires the satellite to know its own position and clock state with very high precision while in orbit. Pulsar approaches this by moving a large part of the estimation work onto the spacecraft. Instead of depending entirely on a ground segment to estimate its state and then pushing that answer up to the vehicle, each Pulsar satellite uses, orbit propagation, detailed onboard modeling, and intersatellite ranging to determine where it is and what time it is. That includes clock behavior, spacecraft motion, yaw, payload biases, and other small effects that start to matter once you are pushing user error down to the centimeter level.
This is where the difference between real-time operation and post-processing becomes important. In many scientific and academic missions, centimeter-level orbit solutions are not generated live onboard, but later on the ground once the measurements have been collected. That approach has a major advantage: you can use measurements from both the past and the future to produce one consistent solution. You also have more freedom in compute, latency, and data handling. In other words, you get to solve the problem later, with more data, more time, and far fewer constraints.
Pulsar’s users don’t get that luxury. For precision agriculture, automated systems, and critical infrastructure, estimation has to happen in real time, on orbit, using only the data available at that moment. That makes the problem much harder. Techniques that are straightforward in post-processing have to be adapted to operate live, with less compute, under tight latency constraints, and with enough stability to support downstream positioning. This is why this design choice matters so much. Precision in orbit is not just a nice internal capability – it directly shapes what the user can achieve on the ground. By generating that precision onboard, Pulsar reduces how much work has to be offloaded to correction systems later, and that is a major part of what makes native precision possible.
Integrating with the Existing Ecosystem
Pulsar is not being introduced into an empty landscape. GNSS already sits inside a large ecosystem of receivers, antennas, correction services, and user workflows that are deeply embedded across industries. That matters because even a strong signal is hard to use if integration is difficult. From the beginning, Pulsar has been designed to fit into that existing environment in a way that lowers friction for adoption and allows users to benefit from the system before the full constellation is in place.
In the near term, that means augmentation. Pulsar works alongside existing GNSS signals and helps improve the overall positioning solution by contributing higher-quality measurements and carrying correction data through the same service. Even a small number of Pulsar satellites can strengthen the solution because those measurements behave differently from the legacy signals already in the mix. They are stronger, more stable, and more useful in conditions where traditional GNSS alone begins to struggle. That makes Pulsar useful early, before a Pulsar-only precision solution is realistic.
Ease of integration is part of that strategy. Existing receiver hardware does not need to be rebuilt from scratch to work with a new level of native accuracy. In many cases, the path forward is through software updates that allow receivers to track and decrypt Pulsar signals while continuing to use the same antennas, front-end components, and core positioning algorithms already in place. The gain comes from the quality of the measurements entering the positioning solution, not from forcing users to replace hardware just to participate in the new architecture.
That matters for adoption because it changes the cost and complexity of deployment. A system that demands new hardware, new workflows, and new infrastructure creates friction. A system that can work with what users already have is much easier to adopt. As the constellation grows, those measurements can begin to take on a larger role in the solution. Over time, that shifts the balance away from layered augmentation on top of legacy GNSS and toward a positioning model where precision is carried more directly by the space segment.
A New Baseline for Physical Intelligence
Native precision changes what is possible at scale by moving more of the localization burden into the system itself. With Pulsar, even low-cost platforms can achieve high levels of positioning accuracy. A drone, for example, can determine its position to within centimeters using a resilient signal, without relying on expensive onboard systems. Self-driving systems can lessen their reliance on complex, power- and compute-hungry localization sensor stacks. And last-mile delivery robots can get your burrito to you with sensors that cost as much as the burrito, not the taqueria.
Beyond applications, there is also a scientific dimension to this system. The Pulsar constellation introduces new opportunities to observe the ionosphere. With hundreds of satellites moving through it, each generating multiple signal paths between space and Earth, the volume and density of measurements increase significantly. This can support improved understanding of ionospheric behavior and contribute to better prediction of space weather conditions, contributing to better positioning.
At the system level, this approach brings together signal design, orbital dynamics, and real-time computation in a tightly integrated way. Development cycles are shorter, supported by software-defined payloads that allow rapid iteration from concept to deployment.
With Pulsar, positioning can move away from systems that depend on multiple external layers working under ideal conditions, toward one where precision is built directly into the signal.

